

用于无人水面舰艇的紧凑型惯性导航系统

带有双天线 GNSS 接收器的一体化 INS 可提供厘米级位置 (RTK) 以及横滚、俯仰和航向。INS还提供准确的升沉数据,并根据波浪周期自动调整。
它适用于发生GNSS中断时的USV导航,以及回声测深仪等精确的有效载荷稳定。
Ekinox-D型
运动、起伏和 RTK
Ekinox-D 是一种多合一的测量级惯性系统,可提供滚转、俯仰、基于 GNSS 的航向、升沉和定位。
由于其双天线功能,它非常适合需要精确航向的应用。
- 0.02° 横滚和俯仰超过 360°
- 0.05°航向(基于GNSS)
- 1 cm RTK GNSS 位置
- 5 cm 起伏,2.5 cm 延迟起伏
- 使用 Qinertia PPK 进行后处理

远地点-D
更高等级的INS
Apogee-D 是一种高精度惯性导航系统,带有双天线 GNSS 接收器,可实现准确的航向。
它集成了上一代三频GNSS接收机,支持RTK、TerraStar和Veripos定位服务。
- 0.008° 横滚和俯仰 (RTK)
- 0.015° 基于 GNSS 的航向
- 1 cm 位置 (RTK)
- 5 cm 起伏,2.5 cm 延迟起伏
- 使用 Qinertia PPK 进行后处理

Ekinox-E型
使用外部 GNSS 导航
Ekinox-E是一种ITAR自由惯性导航系统,可接受来自外部设备的辅助数据。
这种具有成本效益的INS直接将惯性数据与来自外部设备的数据融合在一起,以提供最佳性能。
- 0.02° 3D 方向超过 360°
- 0.05°航向,带外部GNSS
- 1 cm 位置,带外部 GNSS
- 5 cm 起伏,2.5 cm 延迟起伏
- 使用 Qinertia PPK 进行后处理

椭圆-D
微型 RTK GNSS/INS
Ellipse-D 是一款紧凑型惯性导航系统,集成了双天线 RTK GNSS 接收器,可实现准确的航向和定位。新一代产品嵌入了用于高端滤波处理的 64 位架构。
它在实时和后期处理中提供横滚、俯仰、航向、起伏、速度和位置。
- 0.05° 横滚和俯仰超过 360° (RTK)
- 0.2° 航向(双天线 RTK GNSS)
- 5 cm 实时起伏
- 1 cm RTK GNSS 位置
- 使用 Qinertia PPK 软件进行后处理

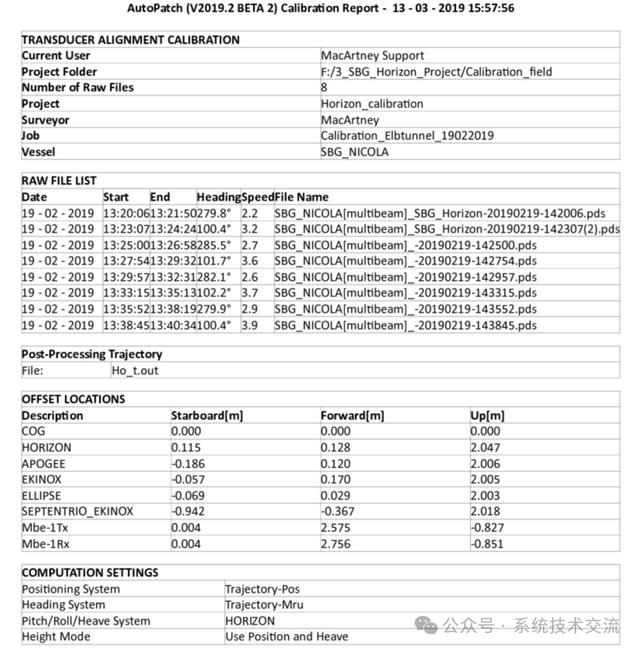
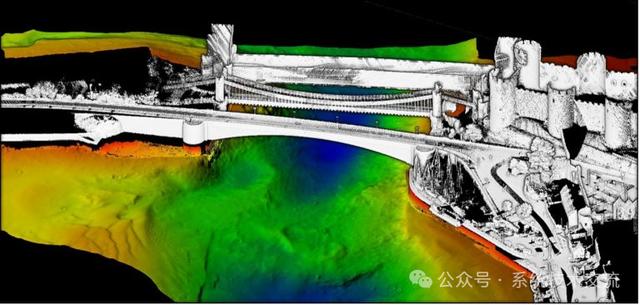
SBG惯性导航系统已在汉堡(德国)港口区进行了为期三天的持久水文调查测试。SBG Systems 和 MacArtney Germany GmbH 为一艘测量船配备了完整的多波束回声测深仪测量配置,并进行了各种测试,以展示 SBG 惯性系统在不同具有挑战性的环境中的性能。
原始INS数据被实时记录,并与来自RESON SeaBat 7125的MBES数据合并到采集软件Teledyne PDS中。水文数据使用BeamWorx AutoClean进行后处理和过滤,INS数据使用SBG Qinertia进行处理。参考是紧密耦合的 Horizo n 高端光纤解决方案。
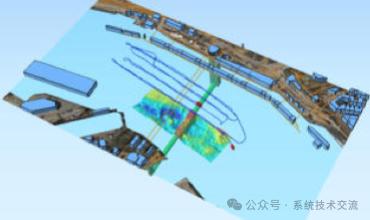
3D模型
基于SBG Horizon的运动和轨迹数据进行校准。
该界面包括测量线、计算测深、质量指示图层和地形特征
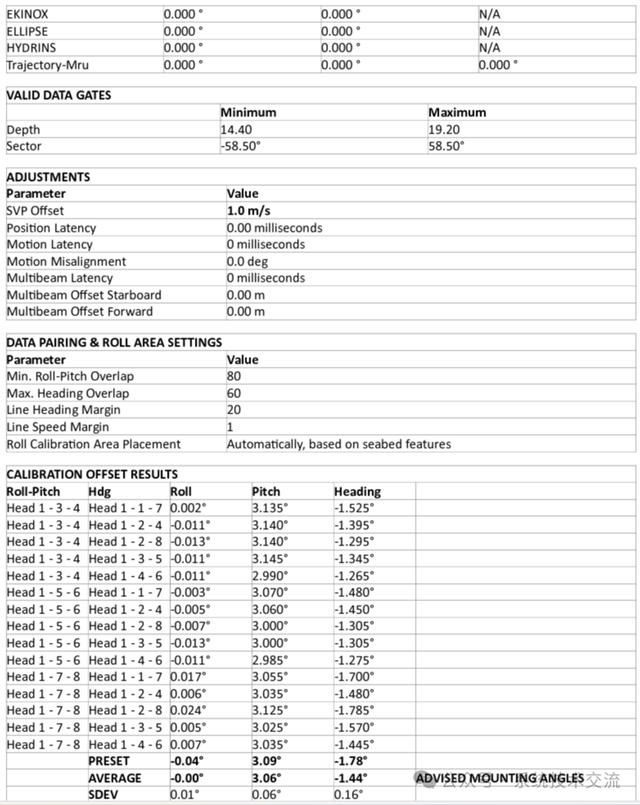
方法论
每个 SBG 惯性系统的校准报告和建议安装角度。在对准调查期间,已经测量并评估了容器配置和传感器设置的每个传感器的偏移量。
Navsight INS用于多波束和激光测量机载USV
LiDAR 和 Sonar 的运动补偿和地理参考

Navsight Apogee 在我们的近岸和海上调查中使用时具有卓越的性能。结合其低功耗、小安装占地面积和较短的初始化时间,它是所有 USV 操作的完美解决方案
总部位于英国的无人测量解决方案公司(USS)创造了一种非常独特的无人水面舰艇,称为“加入级USV”。这款USV旨在满足测量人员今天和未来的需求,采用模块化设计,根据所需的应用提供三种可变的船长。3.50米的基础船长度可以通过增加额外的船体部分扩展到4.25米或5.00米。

设备齐全,适合水文应用
标准USV水文有效载荷包括最高行业标准的传感器,以满足IHO特殊订单调查的要求。其中包括 R2Sonic SONIC 2024 多波束声纳、SBG Apogee Navsight 惯性 + GNSS 解决方案以及用于测量声速的 Valeport MiniSVS 和 SWIFT SVP。这些数据在Hypack或QINSy水文软件中获取,并用于任务规划、数据采集、后处理和最终产品。这种无人驾驶平台非常适合在近岸和近海环境中作业,比同类载人船舶更安全、更具成本效益。
为全 3D 环境添加 LiDAR
虽然 Accession USV 与有效载荷无关且完全可由客户配置,但标准配置也可以与移动 LiDAR 连接,例如 Carlson Merlin 激光扫描仪,用于绘制地面结构以创建水上和水下的完整 3D 点云。这只能通过使用嵌入式 SBG 惯性导航系统 (INS) 来实现,该系统对于开阔天空或具有挑战性的 GNSS 环境(如桥下和树冠下)的浅水区和深水区,或高层建筑经常遮挡 GNSS 地平线的城市地区来说都非常通用。在这种情况下,使用SBG的后处理软件Qinertia可以大大提高厘米级RTK定位精度。这款支持 PPP 和 PPK 的软件提供单个或虚拟基站模式,甚至可以合并用户自己的基站 RINEX 数据。
使用 Accesion 350 USV、SONIC 2024、Apogee Navsight 和 Merlin Laser 测量的康威码头墙、康威桥和 Cob
配备多波束测深仪的 ASV
Cadden展示其集成Ekinox-D惯性导航系统的解决方案

Ekinox-D是一个测量级但紧凑而精确的惯性导航系统。它是基于USV的测深的完美INS
Cadden开发的测量解决方案
我们的合作伙伴 Cadden 于 2019 年 6 月 27 日举行了新的 R2D3 会议,致力于 3 维现实表示的最新进展。借此机会,他们对法国南特的卢瓦尔河进行了自主测深调查。
作为 OceanAlpha 的法国代表,他们为 SL40 自主测量船配备了 R2Sonic 2020 多波束回声测深仪和 SBG 的 Ekinox2-D RTK。
随后,Cadden在活动中展示了调查演示及其解决方案。

Cadden 的测量解决方案集成了 OceanAlpha SL40 自主测量船
设备齐全,可进行测深
对于多波束测深,Cadden 选择了 OceanAlpha SL40,这是一种 1.6 米长的水射流无人水面航行器 (USV)。有效载荷可达 15 公斤的测量仪器,这使其成为小型多波束回声测深仪的理想测量平台。
Cadden带来的解决方案集成了:
- R2Sonic 2020 MBES,便于浅水水文测量
- Valeport Mini SVS,可提高测量精度
- SBG Systems 非常紧凑的 Ekinox2-D 双天线惯性导航系统。这款测量级 IMU 嵌入了 RTK 航向 GNSS 接收器,可提供厘米级的位置精度。
来自该惯性传感器的数据也使用SBG的后处理软件Qinertia进行后处理。 - AML海洋学基地-X2
- A QPS Qinsy 和 Qimera
- A Velodyne Lidar, Inc. VLP16
HydroDron 允许在人迹罕至的水域进行测量
HydroDron 是一种无人驾驶双体船,由轻质耐用的材料制成,采用双壳系统(长 4 米,宽 2 米)。发动机部分配备了两个相互独立工作的电动机,提供足够的速度和机动性,最高速度超过10节。
这种自主和远程控制的浮动平台专门用于有限水域的水文测量,其特点是机动性。可以在汽车拖车或更大的水面舰艇上将其运送到任务区,然后从海滩、海岸、码头、平台或水面舰艇的拖车上发射。HydroDron 可以在大型载人单位无法进入或难以到达的水域中运行,这些单位的使用可能导致不可能或无利可图。
配备齐全的水文潜水艇
该平台的自主导航和自动三维水文系统的开发代表了海洋技术公司远程控制的多用途水面平台的重大改进,用于在港口区域和其他限制区域运行。该平台现在将能够以完全自主的模式执行测深、声纳和其他测量任务,实现自适应轨迹规划和对平台周围近乎实时的态势测量数据进行自动 3D 分析。

图片来源:海洋科技
HydroDron 设备
HydroDron 集成了多种测量设备,以提供多种不同的变体:
- Ping DSP 的集成测深和声纳系统 3DSS-DX-450
- 用于数据采集的工业计算机Getac S410(水文站的主要元件)
- SBG Systems 的外部双天线惯性导航系统 Ekinox2-D
- Syqwest的单波束双频声纳HydroBox HD
- 高频单波束声呐 Echologger EU400
- LiDAR PUCK VLP-16 的 Velodyne
传感器系统还监控平台上和周围的情况,以提高态势感知能力,包括两个垂直探测器,每个船体一个,两个摄像机(旋转和静止)和一个气象站。除了典型的导航数据外,还记录了来自两个摄像头的视频数据、天气信息、电池电压水平、每个浮子下的电流深度等。雷达和两个激光测距仪(船首和船尾)用于该装置的防撞系统。导航数据被传输到岸站,由两个控制台组成:一个专用的导航控制台和一个带有 Getac 计算机的水文控制台。
从测量工作的规划到最终产品的开发,水文测量都由Hypack软件确保。来自多波束探头和LiDAR的水文数据记录在工业计算机上。

图片来源:海洋科技
顶级复刻,货到付款,质量保证,对版发货,售后五年,添加 微信:AFZF66 备注:大云时间圈!
如若转载,请注明出处:https://www.watch555.com/17709.html
{kind=link}